LPMS-CURS3
Unidad de medición inercial (IMU) / AHRS de 9 ejes, versión OEM, con conectividad USB, CAN Bus y UART
LPMS-CURS3
Descripción
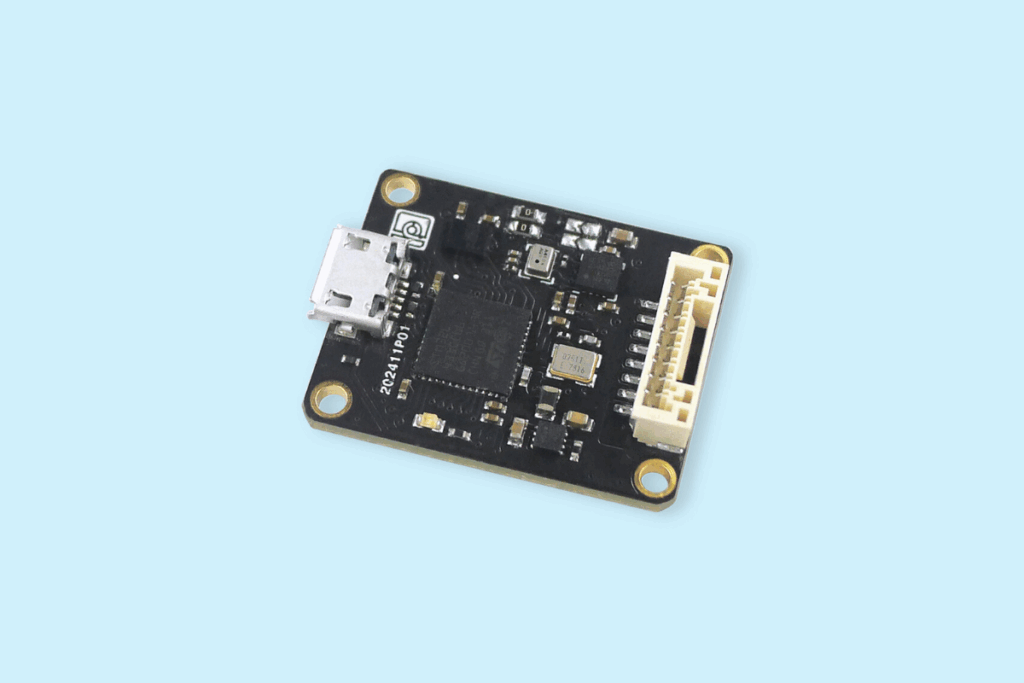
El LPMS-CURS3 es una unidad de medición inercial (IMU) en miniatura de alto rendimiento con múltiples interfaces de comunicación. Al integrar bus CAN, USB y UART, el LPMS-CURS3 se adapta perfectamente a la medición del movimiento tanto de máquinas como de personas en aplicaciones en las que el tamaño y el costo son factores clave. El LPMS-CURS3 se envía sin carcasa y es ideal para integrarlo en su propio dispositivo.
Tenga en cuenta que, si bien todas las versiones de LPMS-CURS3 admiten comunicación USB, el firmware solo admite una interfaz adicional (ya sea RS232, serie TTL o bus CAN). Al realizar el pedido, indíquenos qué modo de comunicación desea utilizar.
La unidad contiene un procesador de señal digital de 32 bits capaz de ejecutar todos los cálculos a bordo en tiempo real. Para obtener más información sobre nuestro método de fusión de sensores, consulte la descripción de IMUcore.
La interfaz de bus CAN del LPMS-CURS3 permite conectar el sensor a una infraestructura de bus CAN más amplia. El sensor admite una implementación mínima de CANopen, así como un formato de mensajes CAN secuencial personalizable. La cantidad de datos de medición transmitidos a través del bus CAN se puede configurar libremente utilizando el software LPMS-Control2. Dependiendo de la configuración de la velocidad de transferencia del sensor, se pueden alcanzar velocidades de datos de hasta 500 Hz.
Descargas
Flyer ( LPMS-CURS3_EN , LPMS-CURS3_JP )
Especificaciones
| Part Number | LPMS-CURS3-CAN | LPMS-CURS3-RS232 | LPMS-CURS3-TTL |
| Euler angle range | Roll:±180° ; Pitch:±90° ; Yaw:±180° | ||
| Resolution | 0.01° | ||
| Accuracy | < 0. 5°(static), < 2° RMS (dynamic) | ||
| Output data type | Raw data/Euler/Quaternion/Linear acceleration/Air pressure/Temperature | ||
| Internal sampling rate | 500Hz | ||
| Communication interface | CAN Bus | RS232 | TTL(UART) |
| Max. baudrate | 1Mbps | 921600bps | 921600bps |
| Communication protocol | CANOpen / SequentialCAN | LPBUS/ASCII | LPBUS/ASCII |
| Max. data update rate | 500Hz | ||
| Accelerometer range | 3 axes, ±2/±4/±8/±16g, 16bits | ||
| Gyroscope range | 3 axes, ±125/±250/±500/±1000/±2000/±4000°/s, 16bits | ||
| Gyroscope noise density | 0.005dps/√Hz | ||
| Magnetometer range | 3 axes, ±2/±8gauss, 16bits | ||
| Pressure sensor | 300~1100hPa | ||
| Power consumption | <135mW@5V | <110mW@5V | <90mW@5V |
| Working temperature | -20~80°C | ||
| Size | 22x28x7.65 | ||
| Weight | 4g | ||
| Power supply | 5V~18V DC | ||
| Connector | BM08B 1.25mm | Micro USB-B | ||
